Idle Mode Implementation. More...
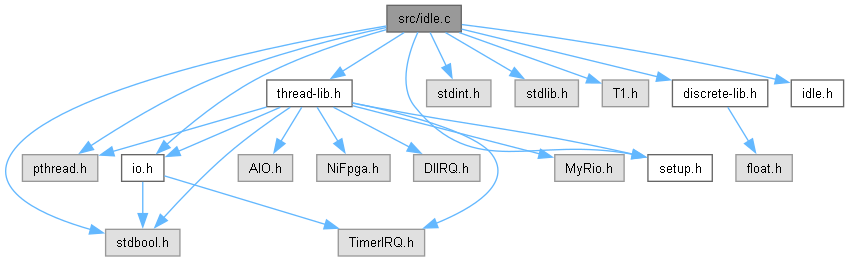
#include <stdbool.h>#include <pthread.h>#include <stdint.h>#include <stdlib.h>#include "T1.h"#include "setup.h"#include "io.h"#include "thread-lib.h"#include "discrete-lib.h"#include "idle.h"
Include dependency graph for idle.c:
Macros | |
| #define | DECIMAL_PRECISION "3" |
| #define | RAD_2_DEG(value) value * 180.0 / PI |
Functions | |
| static void * | IdleModeThread (void *resource) |
| Idle Mode Thread Function. | |
| int | IdleFork () |
| int | IdleJoin () |
Variables | |
| pthread_t | idle_thread |
| Thread ID. | |
| ThreadResource | resource |
| Thread Resources (Shared Resources) | |
| static int | error |
| Local Error Code. | |
Detailed Description
Idle Mode Implementation.
- Version
- 0.1
- Date
- 2024-06-03
- Copyright
- Copyright (c) 2024
Function Documentation
◆ IdleFork()
| int IdleFork | ( | ) |
Executes Idle Mode (concurrently), so we see how badly we messed up our code/sensors
- Postcondition
- If its already running, does nothing
- Returns
- 0 upon success, negative if error
Here is the call graph for this function:

◆ IdleJoin()
| int IdleJoin | ( | ) |
Stops Idle Mode (concurrent process) and our pain
- Returns
- 0 upon success, negative if error
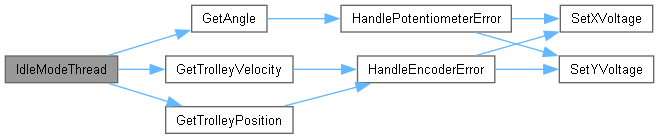
◆ IdleModeThread()
|
static |
Idle Mode Thread Function.
The Thread Function for Idle Mode
- Parameters
-
resource A pointer to a Resource sturcture for Idle Mode
- Returns
- NULL
How many decimal places to include
Radians to Degrees Conversion Factor
Here is the call graph for this function:
Generated by