Sensor/Actuator (Input/Output) Interfacing Library. More...
#include <stdint.h>#include <stdlib.h>#include <string.h>#include <stdbool.h>#include <math.h>#include <pthread.h>#include "MyRio.h"#include "DIO.h"#include "T1.h"#include "conC_Encoder_initialize.h"#include "discrete-lib.h"#include "error.h"#include "thread-lib.h"#include "io.h"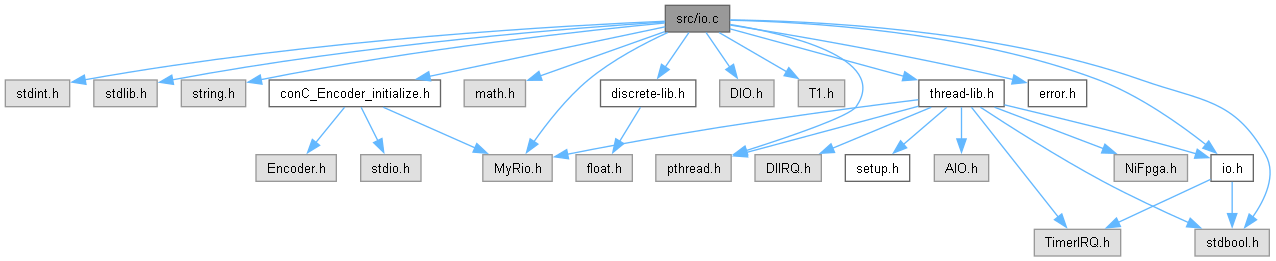
Macros | |
| #define | X_CONNECTOR_ID 0 |
| X Motor Encoder Connector ID (on Connector C) | |
| #define | Y_CONNECTOR_ID 1 |
| Y Motor Encoder Connector ID (on Connector C) | |
| #define | POTENTIOMETER_SLOPE -2.11 * PI / 180.0 |
| #define | POT_V_LIM_LO -20.0 |
| Lower Potentiometer Voltage Saturation Limit (V) | |
| #define | POT_V_LIM_HI 20.0 |
| Upper Potentiometer Voltage Saturation Limit (V) | |
| #define | ENC_CNT_REV 2000.0 |
| #define | M_PER_REV 0.01267 * PI |
| #define | ENC_2_POS(value) (value) / ENC_CNT_REV * M_PER_REV |
| #define | ENC_2_VEL(value) (value) / (BTI_S * ENC_CNT_REV) * M_PER_REV |
| #define | X_LIM_LO 0.0 |
| Lower X Limit. | |
| #define | Y_LIM_LO 0.0 |
| Lower Y Limit. | |
| #define | X_LIM_HI 0.35 |
| Higher X Limit. | |
| #define | Y_LIM_HI 0.35 |
| Higher Y Limit. | |
| #define | VEL_LIM_ABS 1.0 |
| Absolute Velocity Limit. | |
| #define | CHANNELS 16 |
| Number of Channels. | |
| #define | LCD_KEYPAD_LEN 4 |
| Keypad Length. | |
| #define | UNIT_VEL 0.15 |
| #define | DEL_ROW 7 |
| #define | DEL_COL 3 |
| #define | WAIT_CONST 417000 |
Typedefs | |
| typedef bool | Keymap[9] |
Functions | |
| static void * | KeymapThread (void *resource) |
| static int | HandleEncoderError (Positions *curr_pos, Velocities *curr_vel) |
| static int | HandlePotentiometerError (Angles *curr_ang) |
| static void | wait () |
| int | IOSetup () |
| int | IOShutdown () |
| void | Reset () |
| int | GetReferenceVelocityCommand (Velocities *result) |
| int | GetReferenceAngleCommand (Angles *result) |
| int | GetAngle (Angles *result) |
| int | GetTrolleyPosition (Positions *result) |
| int | GetTrolleyVelocity (Velocities *result) |
| int | GetUserPosition (Angles *angle, Positions *pos, Positions *result) |
| int | GetUserVelocity (Angles *angle, Velocities *vel, Velocities *result) |
| int | SetXVoltage (Voltage voltage) |
| int | SetYVoltage (Voltage voltage) |
| bool | PressedDelete () |
| int | KeyboardControlFork () |
| int | KeyboardControlJoin () |
| char | getkey () |
Variables | |
| static bool | reset |
| Reset Variable for measuring velocity. | |
| static float | potentiometer_v_x_intercept |
| static float | potentiometer_v_y_intercept |
| static MyRio_Aio | x_potentiometer |
| X Potentiometer. | |
| static MyRio_Aio | y_potentiometer |
| Y Potentiometer. | |
| static MyRio_Encoder | x_encoder |
| X Motor Encoder. | |
| static MyRio_Encoder | y_encoder |
| Y Motor Encoder. | |
| static int32_t | first_enc_state [2] |
| static int32_t | prev_enc_state [2] |
| static bool | holding_vel_set |
| Indicator if the holding for velocity is set. | |
| static bool | holding_pos_set |
| Indicator if the holding for position is set. | |
| static Velocities | holding_vel |
| Encoder Holding for velocity. | |
| static Positions | holding_pos |
| Encoder Holding for position. | |
| static const Encoder_StatusMask | enc_st_mask |
| Encoder Error Mask. | |
| MyRio_Aio | x_motor |
| X Motor Voltage Channel. | |
| MyRio_Aio | y_motor |
| Y Motor Voltage Channel. | |
| MyRio_IrqTimer | timer |
| Universal Timer. | |
| static MyRio_Dio | channel [CHANNELS] |
| Keyboard channels. | |
| static pthread_mutex_t | keyboard |
| Keyboard lock. | |
| static Keymap | keymap |
| Our keymap. | |
| static pthread_t | keymap_thread |
| Thread for Keymap Thread. | |
| static ThreadResource | keymap_resource |
| Thread Resource for Keymap Thread. | |
| static int | error |
| Local Error Flag. | |
Detailed Description
Sensor/Actuator (Input/Output) Interfacing Library.
- Version
- 0.1
- Date
- 2024-06-03
- Copyright
- Copyright (c) 2024
Macro Definition Documentation
◆ ENC_2_POS
| #define ENC_2_POS | ( | value | ) | (value) / ENC_CNT_REV * M_PER_REV |
Converts a BDI quantity to meters
- Parameters
-
value THe BDI to convert
◆ ENC_2_VEL
| #define ENC_2_VEL | ( | value | ) | (value) / (BTI_S * ENC_CNT_REV) * M_PER_REV |
Converts a BDI/BTI quantity to meters per second
- Parameters
-
value The value to convert
◆ ENC_CNT_REV
| #define ENC_CNT_REV 2000.0 |
Number of counts in one revolution TODO(nguy8tri): Find this quantity
◆ M_PER_REV
| #define M_PER_REV 0.01267 * PI |
Meters per revolution Diameter of upper pulley (12 mm) * PI
◆ POTENTIOMETER_SLOPE
| #define POTENTIOMETER_SLOPE -2.11 * PI / 180.0 |
Best-Fit Potentiometer Slope (rad/V) TODO(nguy8tri): Find this quantity
◆ UNIT_VEL
| #define UNIT_VEL 0.15 |
The unit velocity stop corresponding to a keypad touch (m/s)
Typedef Documentation
◆ Keymap
| typedef bool Keymap[9] |
Holds booleans indicating which buttons (1 through 9) are being pressed
Function Documentation
◆ GetAngle()
| int GetAngle | ( | Angles * | result | ) |
Obtains the angle of the harness
- Parameters
-
result A return parameter, which will become the angle along both directions
- Returns
- 0 upon success, other integers if otherwise
- result, which will define the angle of the harness along both lateral directions

◆ getkey()
| char getkey | ( | ) |
Keypad characters
Locking style allows for getkey() to take precedence over all other keyboard commands
◆ GetReferenceAngleCommand()
| int GetReferenceAngleCommand | ( | Angles * | result | ) |
Obtains the user command (for tracking)
- Parameters
-
result A return parameter, which will become the desired angle requested by the user
- Returns
- 0 upon success, negative otherwise
- An Angles structure, which reflects the angle requested from the user
◆ GetReferenceVelocityCommand()
| int GetReferenceVelocityCommand | ( | Velocities * | result | ) |
Obtains the user command (for anti-sway)
- Parameters
-
result A return parameter, which will become the change in position requested by the user
- Returns
- 0 upon success, negative otherwise
- A Velocities structure, which reflects the change in position requested from the user
Setup discrete velocity commands, -1, 0, and 1
◆ GetTrolleyPosition()
| int GetTrolleyPosition | ( | Positions * | result | ) |
Obtains the Trolley Position
- Parameters
-
result A return parameter, which will become the position of the trolley
- Returns
- 0 upon success, other integers if otherwise
- A Positions structure, which defines the Position of the Motor in the lateral plane
- Precondition
- This is called precisely once every BTI

◆ GetTrolleyVelocity()
| int GetTrolleyVelocity | ( | Velocities * | result | ) |
Obtains the Trolley Velocity
- Parameters
-
result A return parameter, which will become the velocity of the trolley
- Returns
- 0 upon success, other integers if otherwise
- A Velocities structure, which defines the velocity of the trolley in the lateral plane
- Precondition
- This is called precisely once every BTI

◆ GetUserPosition()
Obtains the User Position
- Parameters
-
angle The rope angle pos The trolley position result A return parameter, which will become the position of the user
- Returns
- 0 upon success, other integers if otherwise
- A Positions structure, which defines the Position of the User in the lateral plane
◆ GetUserVelocity()
| int GetUserVelocity | ( | Angles * | angle, |
| Velocities * | vel, | ||
| Velocities * | result ) |
Obtains the User Velocity
- Parameters
-
angle The rope angle vel The trolley velocity result A return parameter, which will become the velocity of the user
- Returns
- 0 upon success, other integers if otherwise
- A Velocities structure, which defines the Velocity of the User in the lateral plane

◆ HandleEncoderError()
|
inlinestatic |
Handles Error Processing from Position/Velocity Measurements
- Parameters
-
curr_pos The current position curr_vel The current velocity
- Returns
- 0 upon no error, negative otherwise (using the universal error codes)
- Postcondition
- Iff negative is returned, both motors are switched off
Check Positional Limits first
Now, check velocity limits
Now, check if there is an encoder error
u_error = EENCR; conC_Encoder_initialize(myrio_session, &x_encoder, X_CONNECTOR_ID);
u_error = EENCR; conC_Encoder_initialize(myrio_session, &y_encoder, Y_CONNECTOR_ID);
Output Error
◆ HandlePotentiometerError()
|
inlinestatic |
Handles Error Processing for Potentiometer Measurements
- Parameters
-
curr_ang The current angle reading
- Returns
- 0 upon no error, ESTRN otherwise
◆ IOSetup()
| int IOSetup | ( | ) |
Sets up the System-Sensor/Actuator Interface
- Returns
- 0 upon success, negative otherwise
Setup Timer
Setup Encoders Channels
Setup Potentiometer Voltage Channels (are swapped)
Setup Motor Channels
Setup Keyboard Channels & Resources
Setup Reset flag
Calibration Message
Set Reference Positions
Setup the holding
Calibrate voltage intercepts for potentiometer

◆ IOShutdown()
| int IOShutdown | ( | ) |
Shutsdown the System-Sensor/Actuator Interface
- Returns
- 0 upon success, negative otherwise
Dissasociate with Encoders
Dissasociate with Potentiometers
Disassociate with Motor
Destroy Keyboard Lock
◆ KeyboardControlFork()
| int KeyboardControlFork | ( | ) |
Enables Keyboard Control for Anti-Sway (concurrently)
- Postcondition
- If its already running, does nothing
- Returns
- 0 upon success, negative if error
Begin Keyboard Thread

◆ KeyboardControlJoin()
| int KeyboardControlJoin | ( | ) |
Stops Keyboard Control for Anti-Sway (concurrent process)
- Returns
- 0 upon success, negative if error
Destroy Keymap Thread
◆ KeymapThread()
|
inlinestatic |
Obtains the numerical buttons pressed (1 through 9)
- Returns
- NULL
- Postcondition
- Updates keymap with all the number buttons, excluding 0, that are pressed
◆ PressedDelete()
| bool PressedDelete | ( | ) |
Detects if the DEL key is pressed on the keyboard
- Returns
- true iff DEL is pressed on the keyboard
◆ Reset()
| void Reset | ( | ) |
Resets GetTrolleyPosition and GetTrolleyVelocity by setting the velocity to zero
- Postcondition
- The next time GetTrolleyVelocity is called, both velocities are zero
◆ SetXVoltage()
| int SetXVoltage | ( | Voltage | voltage | ) |
Sets the voltage of the X motor
- Returns
- 0 upon success, other integers if otherwise
◆ SetYVoltage()
| int SetYVoltage | ( | Voltage | voltage | ) |
Sets the voltage of the Y motor
- Returns
- 0 upon success, other integers if otherwise
◆ wait()
|
inlinestatic |
Waits for approximate 5 ms
- Postcondition
- About 5 ms have passed
Wait Constant
Variable Documentation
◆ enc_st_mask
|
static |
Encoder Error Mask.
◆ first_enc_state
|
static |
First Encoder state for both the X and Y Encoders
◆ potentiometer_v_x_intercept
|
static |
Calibrated Voltage Intercept (x-intercept) for X Potentiometer
◆ potentiometer_v_y_intercept
|
static |
Calibrated Voltage Intercept (x-intercept) for Y Potentiometer
◆ prev_enc_state
|
static |
Previous Encoder state (from the last time either GetTrolleyPosition or GetTrolleyVelocity is caled), for both the X and Y Encoders
◆ timer
| MyRio_IrqTimer timer |
Universal Timer.
The Timer.
Generated by